Face Recognition
A Python application for real-time face recognition from a webcam, with
multiple runtime modes for different performance and camera-angle
scenarios. The system uses OpenCV for video capture, on-screen rendering,
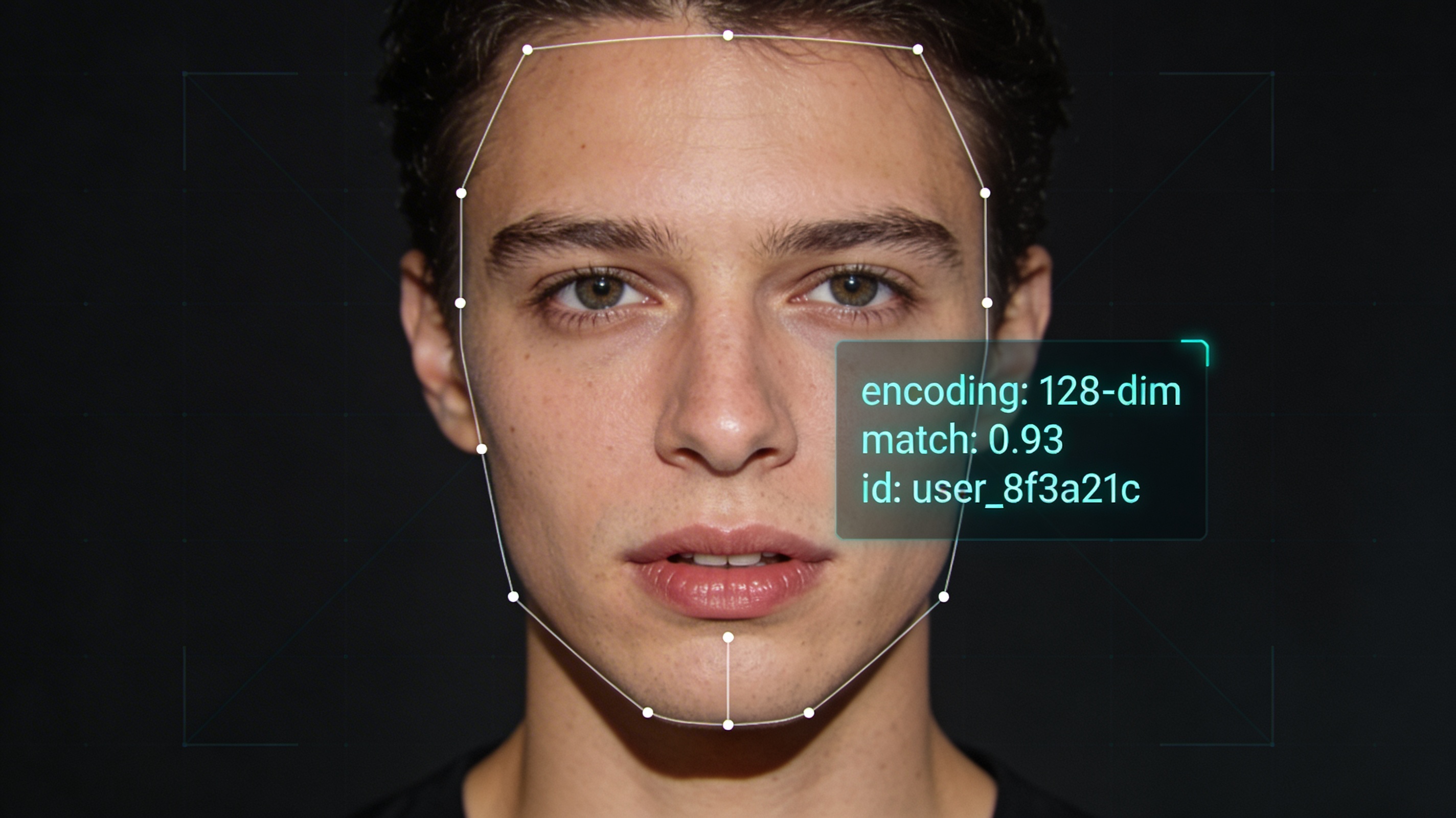
and image preprocessing, while the face_recognition library
powered by dlib performs face detection and computes
face encodings.
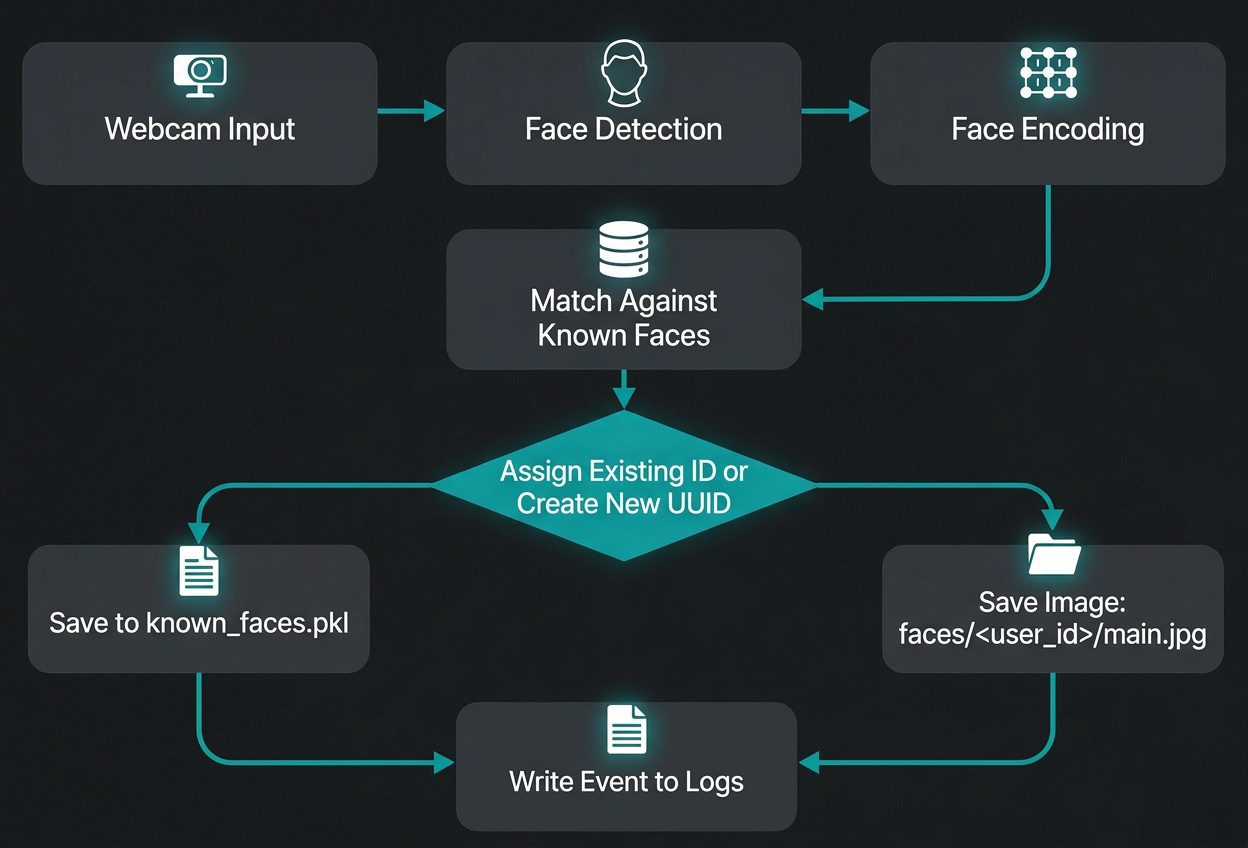
The project is designed for autonomous operation: new faces automatically
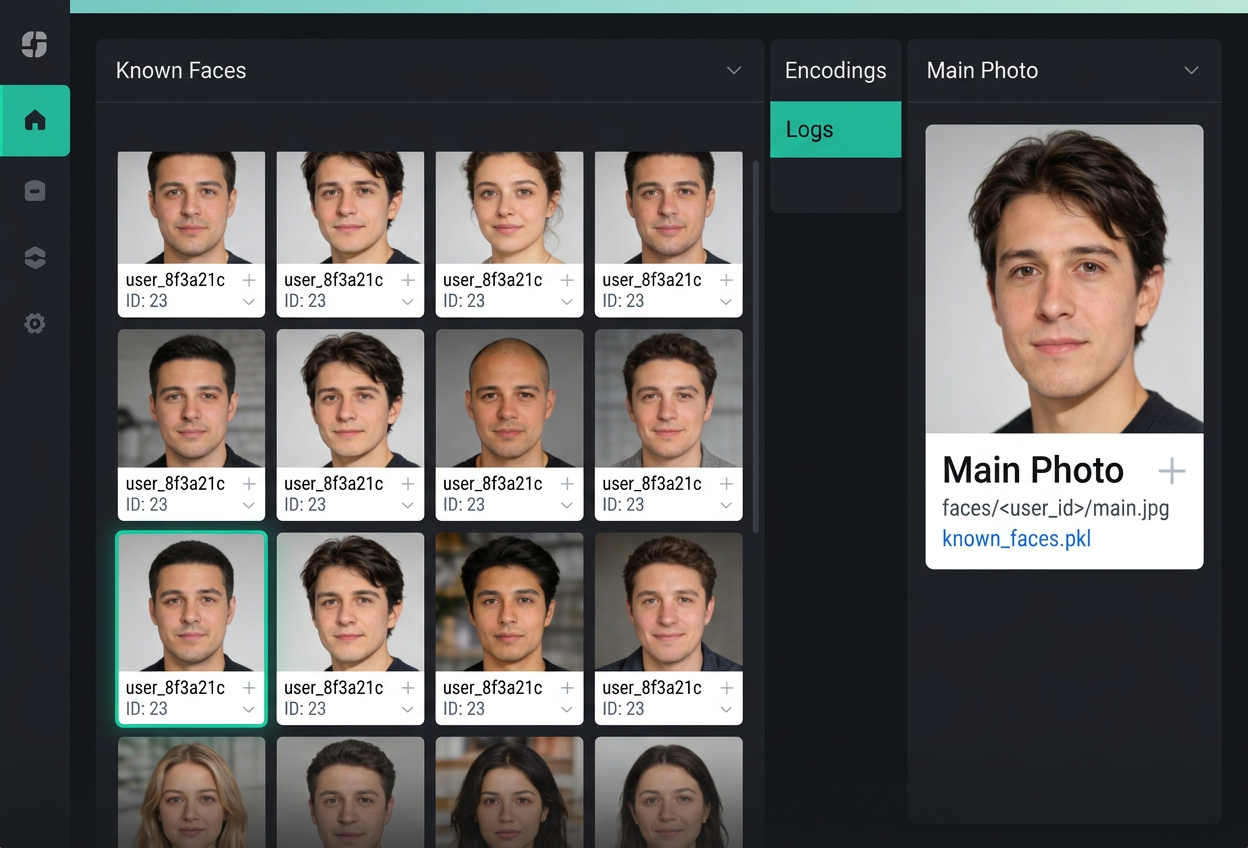
receive a UUID, are saved as Unknown, get an initial photo,
and store their first embedding. Over time, the system can append
additional encodings for the same person to improve recognition stability
across angle changes, partial misses, and noisy frames.